


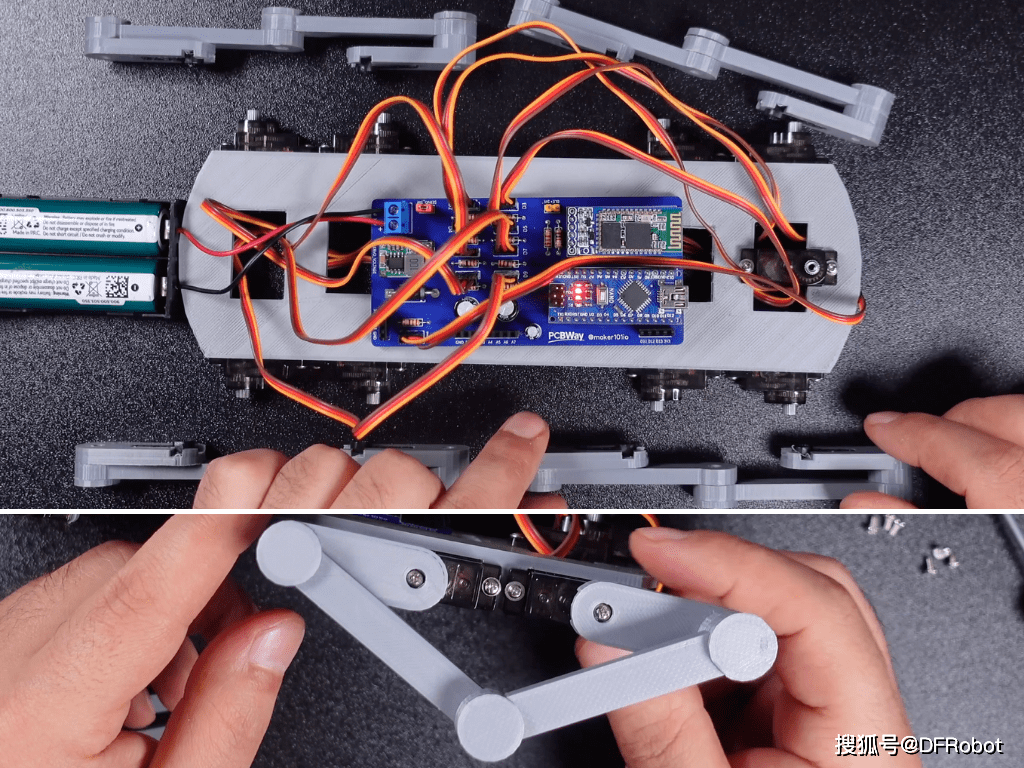
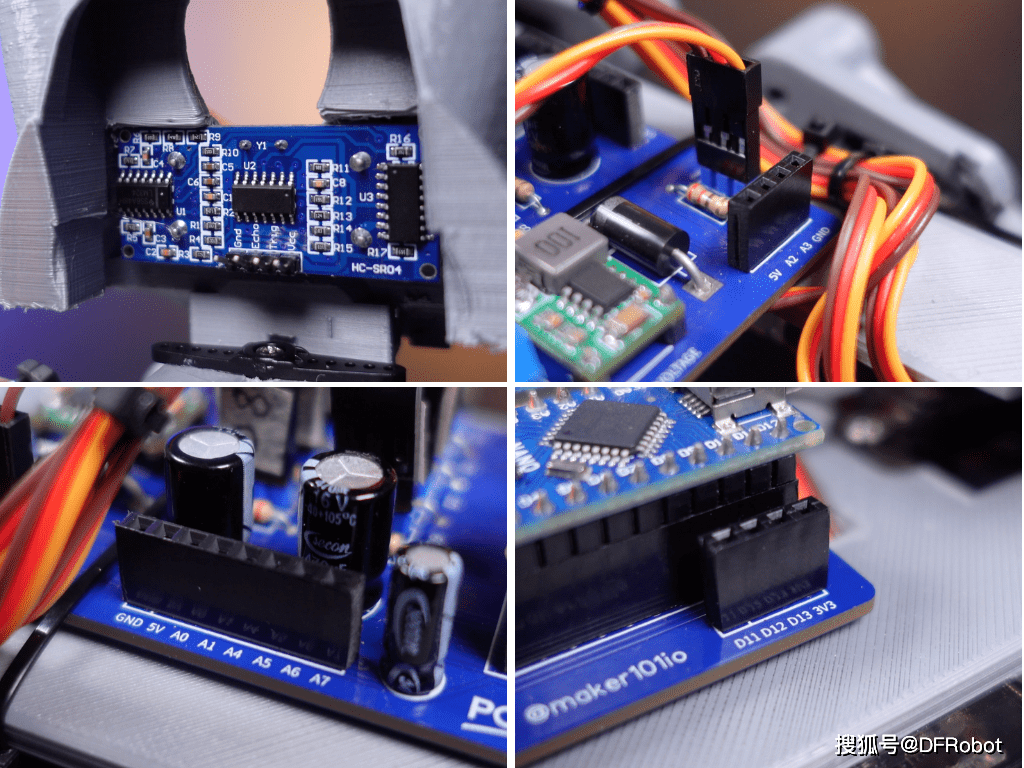
在项目中,作者使用了之前设计的基于Arduino Nano的多伺服电机控制板。该板可以控制多达9个伺服电机,以及通过蓝牙模块进行无线伺服电机控制。此外,通过板上的可调电压模块可以控制不同类型的伺服电机。
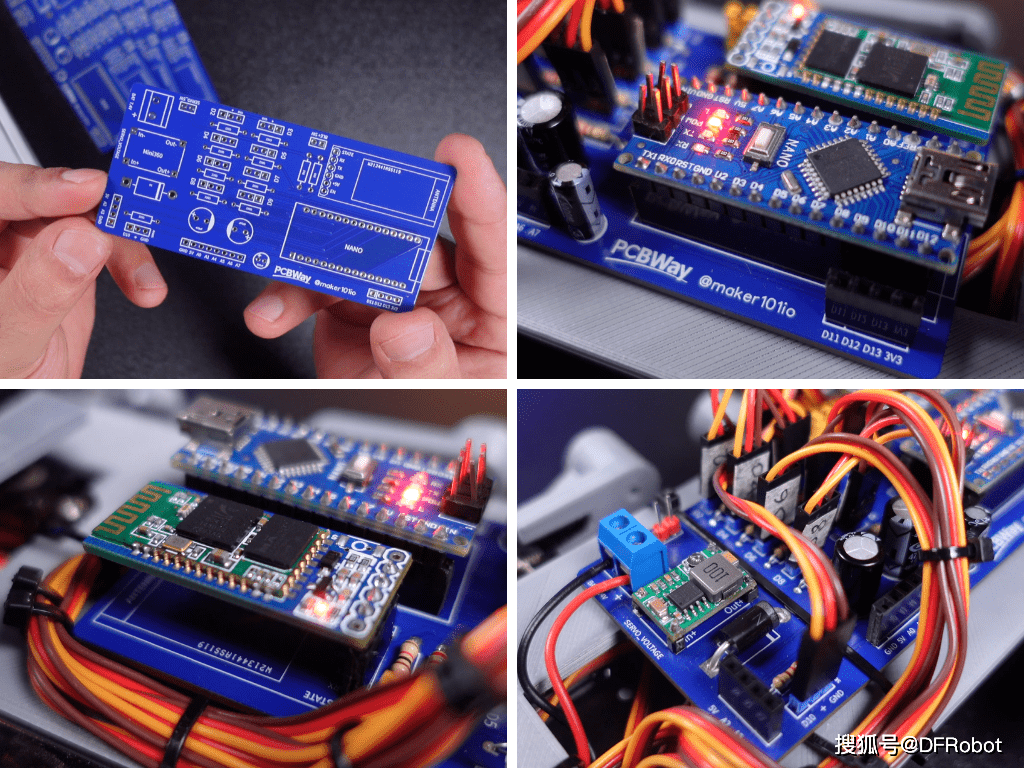
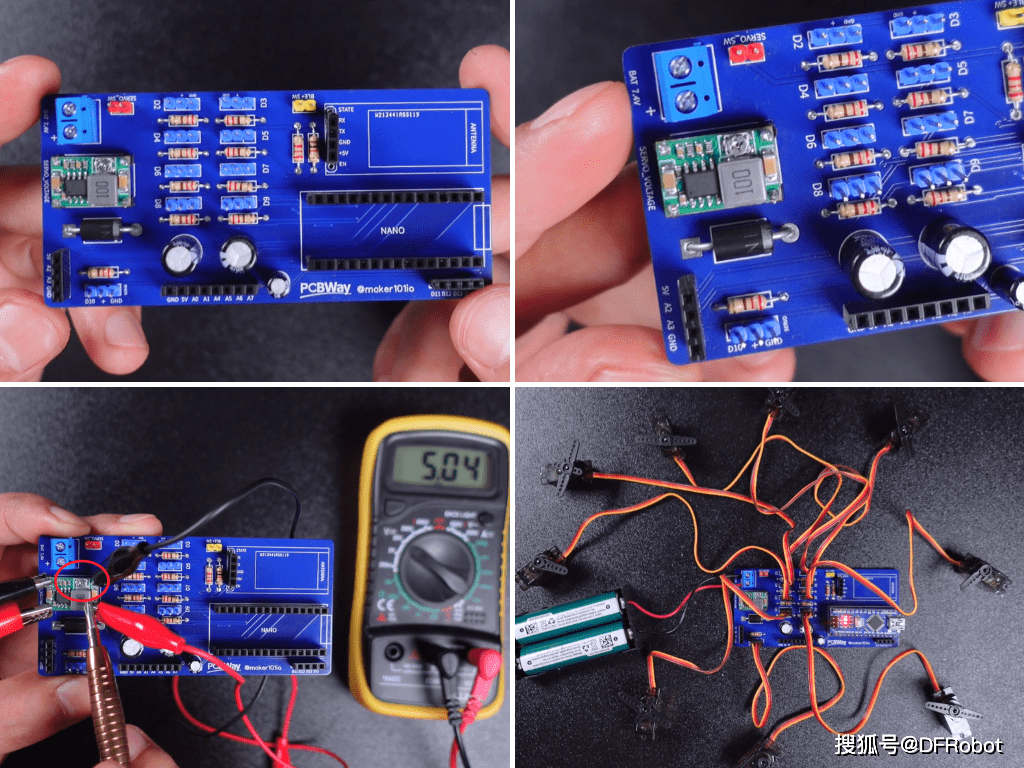
如果我们仔细看一下设计的电路图,板上有一个可调电压调节器模块。转换模块使得可以根据伺服电机的功率需求独立于Arduino Nano调节电压。所需的电压水平可以通过模块上的电位器进行调整。
在伺服电机电源线上增加了一个肖特基二极管,它的功能是通过帮助控制电源线波动、电压反流和电磁噪声来提高电路的可靠性。作者还在电路中添加了两个电容器。伺服电机在突然移动时可能需要大量电流,电容器可以用来满足这种突然的电力需求,稳定电源,并帮助减少电源波动。
作者还在每个伺服电机信号腿上添加了一个电阻。电阻器在电路中充当保护电阻。电阻器通过以某种方式限制来自微的信号来保护伺服电机的信号腿免受过电流和有害电压的影响。
由于伺服电机和Arduino Nano通常使用电路的电源线,因此添加了一个跳线来在编程微时断开连接到伺服电机的电源线。对于蓝牙模块也是如此,由于TX和RX引脚在编程期间“忙碌”,因此在蓝牙电源输入处添加了一个跳线,以防止通信错误,使得在编程期间可以切断蓝牙电源。最后,一个电容器被添加到Arduino Nano VIN供电输入以减少电源波动。
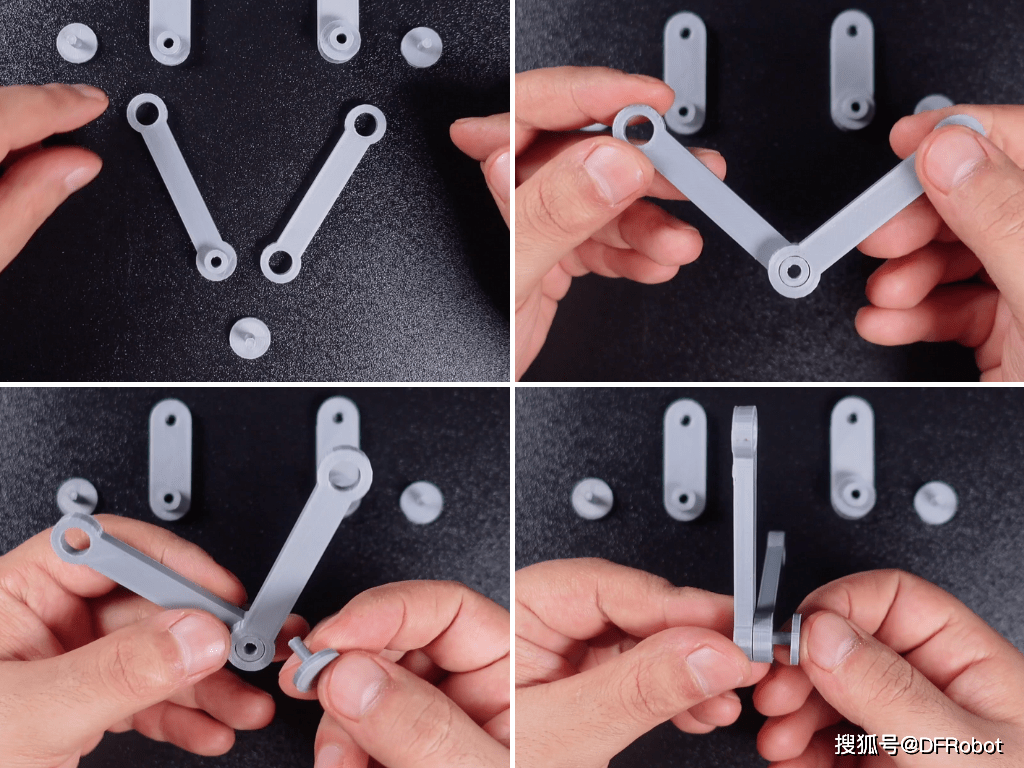
总共有4条腿,所以你需要打印4套腿部件。部件非常容易组装,可以用锉刀或砂纸把关节弄平。kaiyun开体育官方作者使用了锉刀和砂纸,这使得部件的关节移动更自由,也减轻了伺服的负荷,使其更容易移动。


涂胶时不要溢出!将少量胶水涂在3D部件上,将冷冻喷雾涂在伺服臂上,然后将其装入臂槽中。10秒的干燥时间就足够了。另外作者还涂了非常少量的胶水,以防止3D部件连接销从孔中脱落。
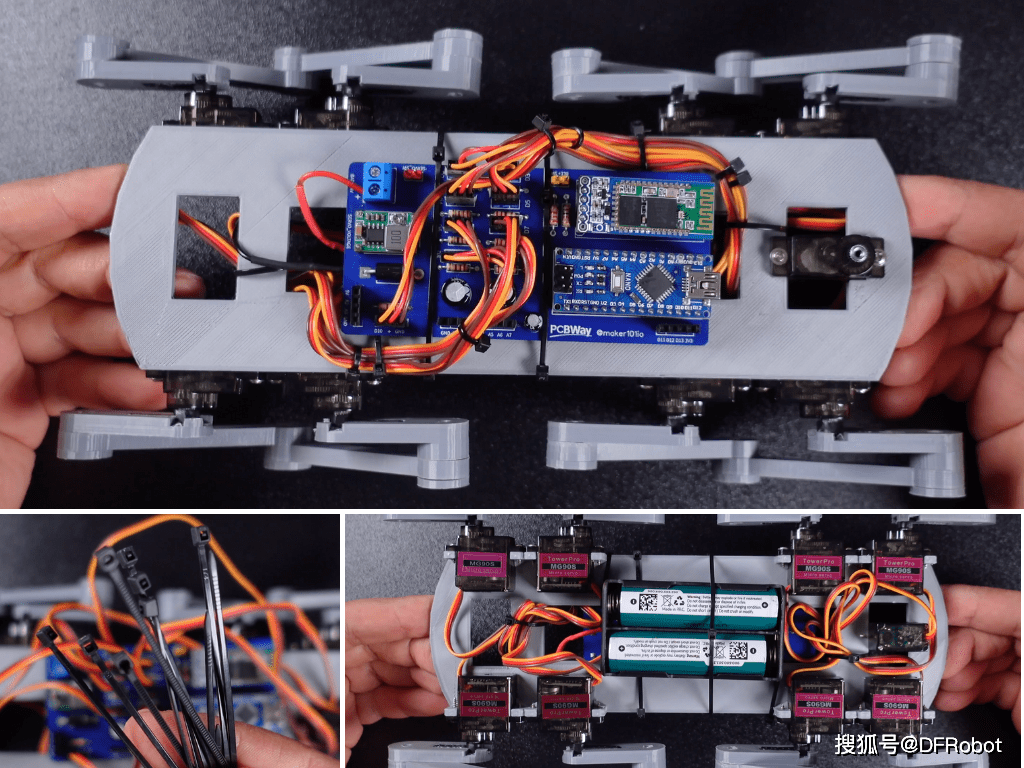
机器狗中使用了9个MG90S伺服电机。MG90S微型伺服电机是SG90微型伺服电机的高级版本,是最广泛使用的伺服电机。伺服电机是低循环(快速)、高扭矩电机。因此,它们经常在机器人应用中使用。遥控车kaiyun官方下载、遥控飞机、机器人臂、遥控船等也有,它有许多使用领域。
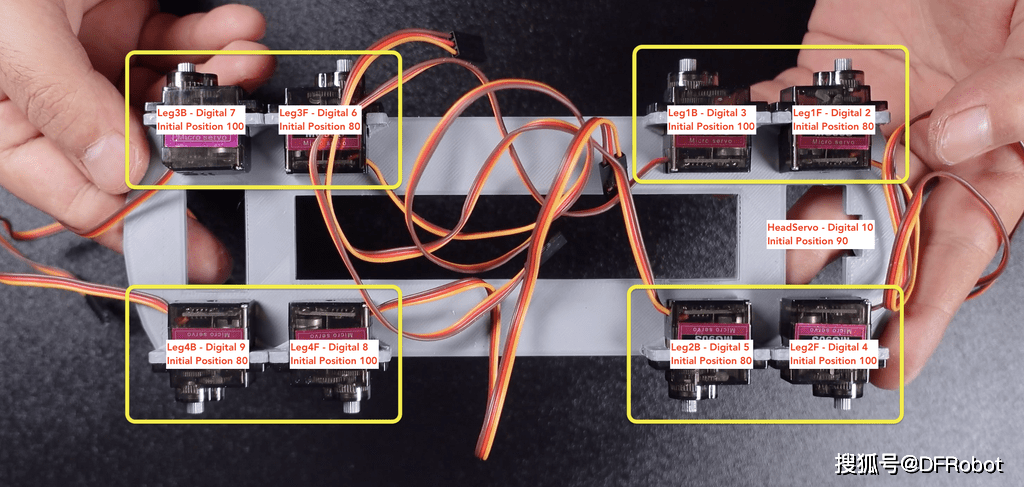
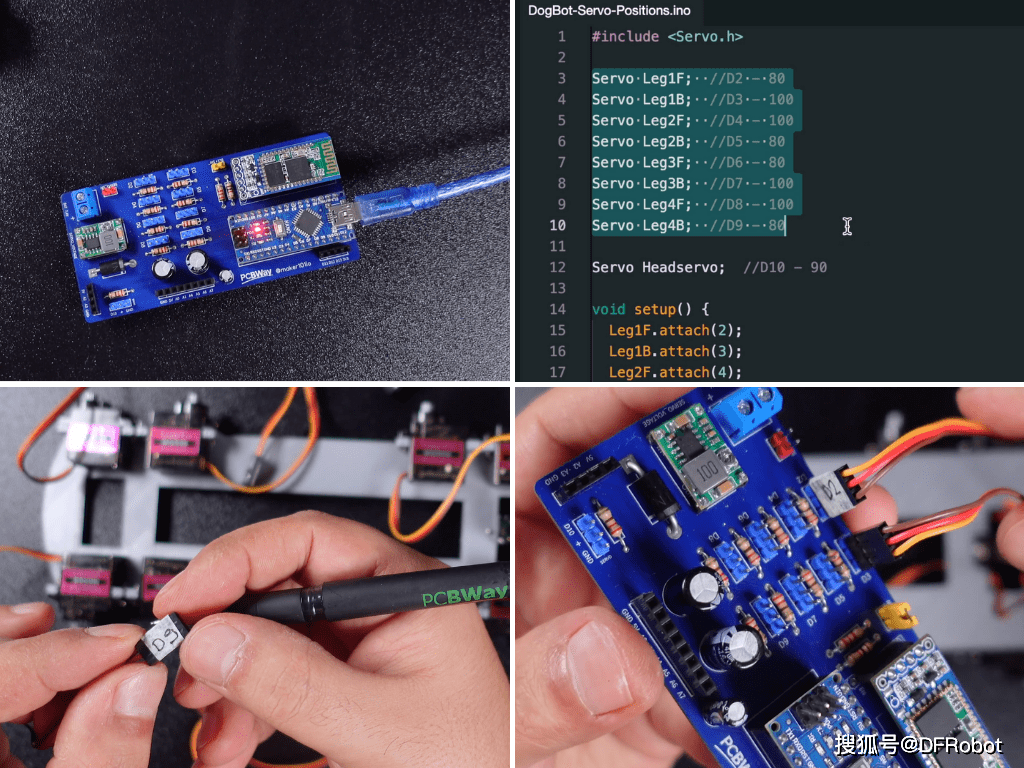
在将伺服固定到机身后,需要在连接腿部之前上传代码将所有伺服移动到初始位置。作者已经标记了伺服引脚,好可以知道伺服连接到哪个Arduino Nano数字输入引脚。重要的是,在将板子连接到USB口之前,记得拔下SERVO_PWR(伺服电机电源)和BLE_PWR(蓝牙电源)跳线。否则,如果伺服电机连接到板上,它们可能会过电流并损坏USB口,蓝牙模块在上传代码期间可能会导致通信问题。
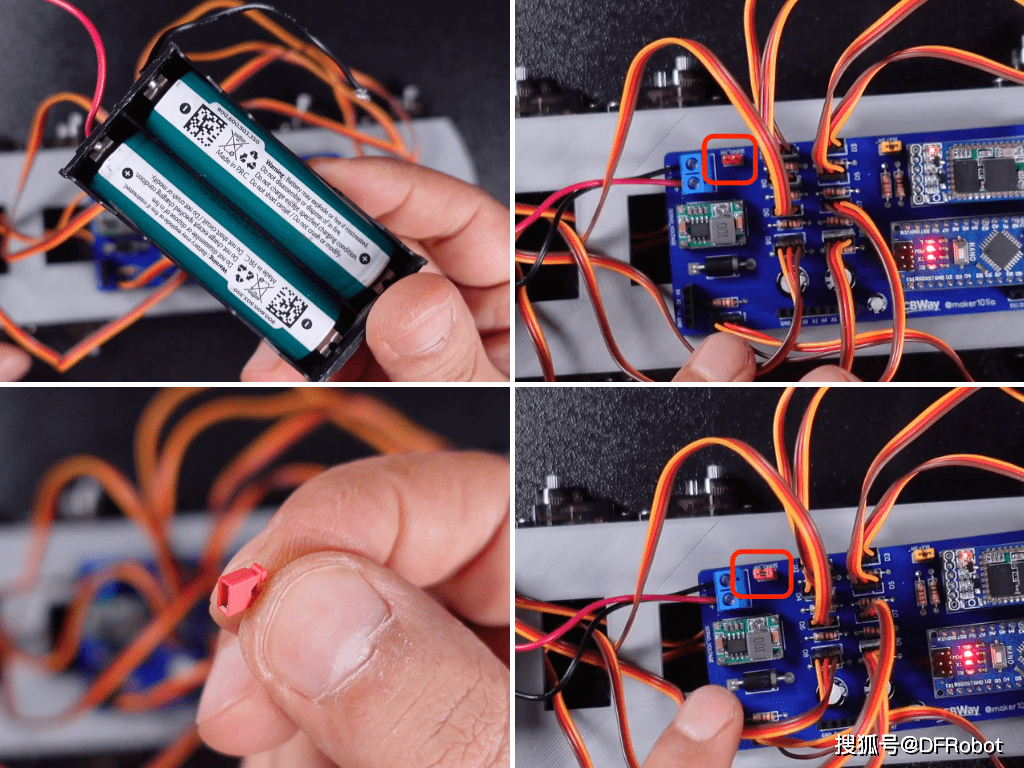
上传代码后,将电池连接到电路(使用了2x 3.7V 18650锂离子电池)。然后连接跳线SERVO_PWR,伺服电机应该会回到初始位置。
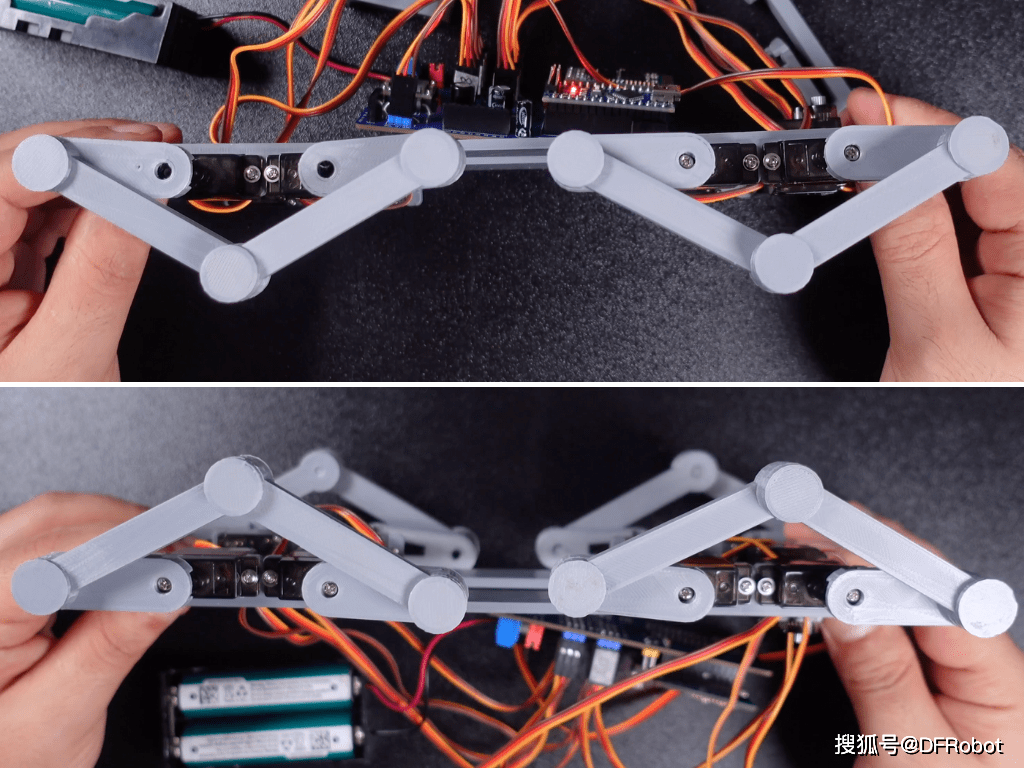
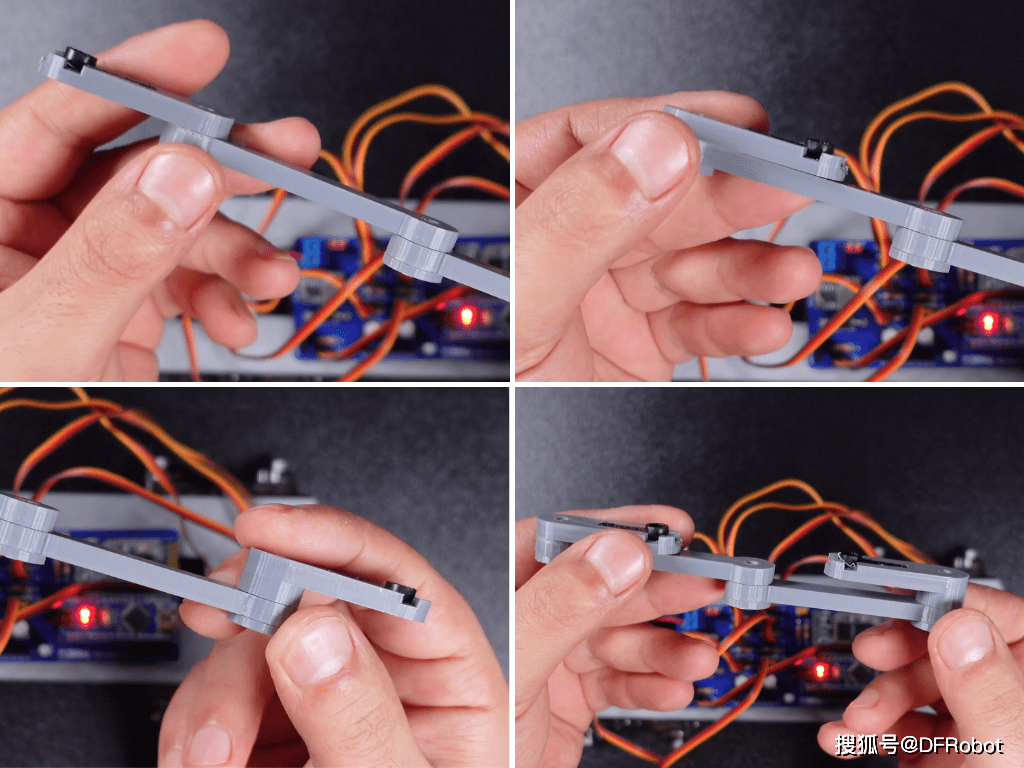
如图像或视频所示,将腿的两端折叠起来。将身体侧放并以90度将腿的两端连接到伺服电机上,它看起来像一个倒三角形。在安装腿时,电路中仍然有电,这是为了避免伺服位置的移动。
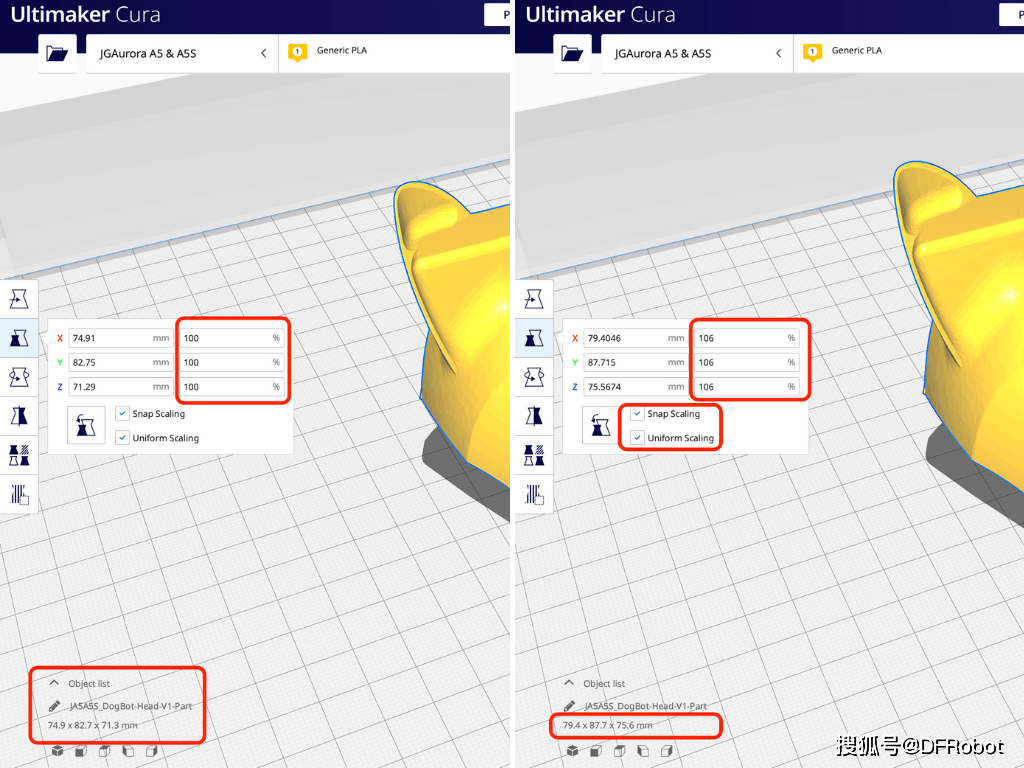
建议在打印前将3D头部部分缩放至106%,这样HC-SR04距离传感器和伺服臂更容易安装。

再次使用快干胶将双头伺服臂安装到头部。然后将头部放在身体上的伺服上,并用伺服电机臂螺丝固定头部。
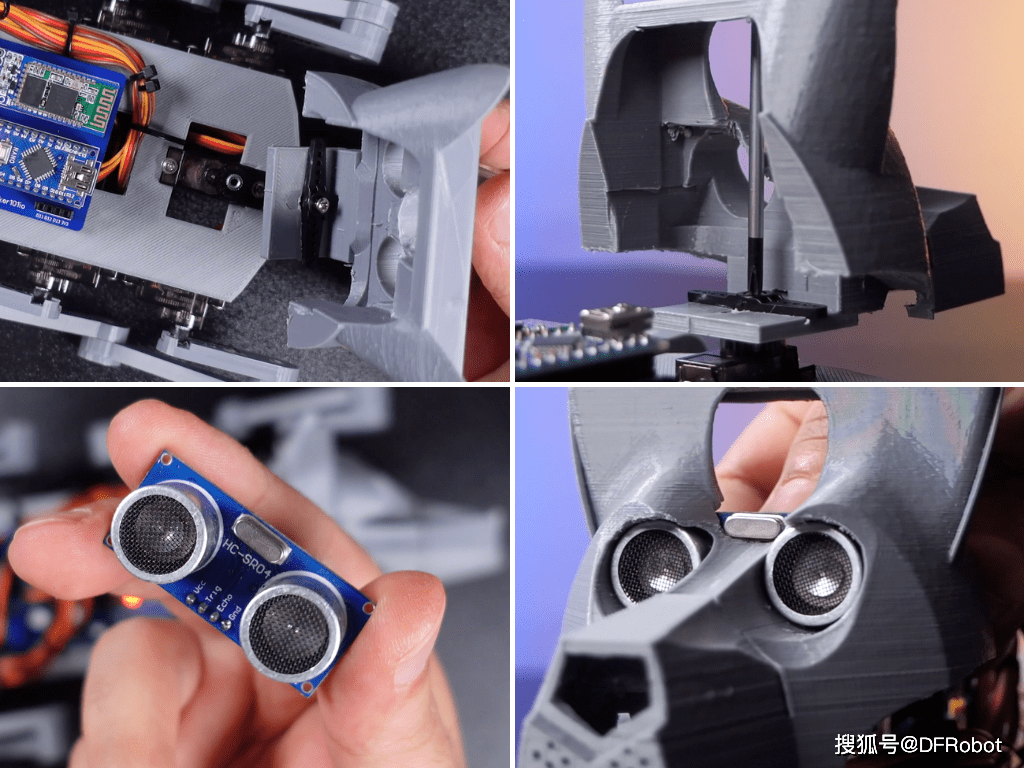
HC-SR04距离传感器目前没有功能。然而,在未来的日子里,作者将更新机器狗、项目代码和移动应用程序,所以在板上留下了足够的输入输出引脚以供额外的传感器使用。
HC-SR04距离传感器目前没有功能。然而,在未来的日子里,作者将更新机器人、项目代码和移动应用程序,所以在板上留下了足够的输入输出引脚以供额外的传感器使用。

下载应用程序源代码并用Arduino IDE打开,(重要)在将板子连接到USB口之前再次拔下SERVO_PWR和BLE_PWR跳线,然后连接板并上传代码。
转到MIT App Inventor,这是一个免费平台,你可以轻松创建移动应用程序。包括共享的(.aia)应用程序项目文件。你也可以对UI和后端进行更改,但这需要一点技术。
然后从构建选项创建Android App(.apk)文件,下载和代码扫描选项都可用于获取应用安装文件。
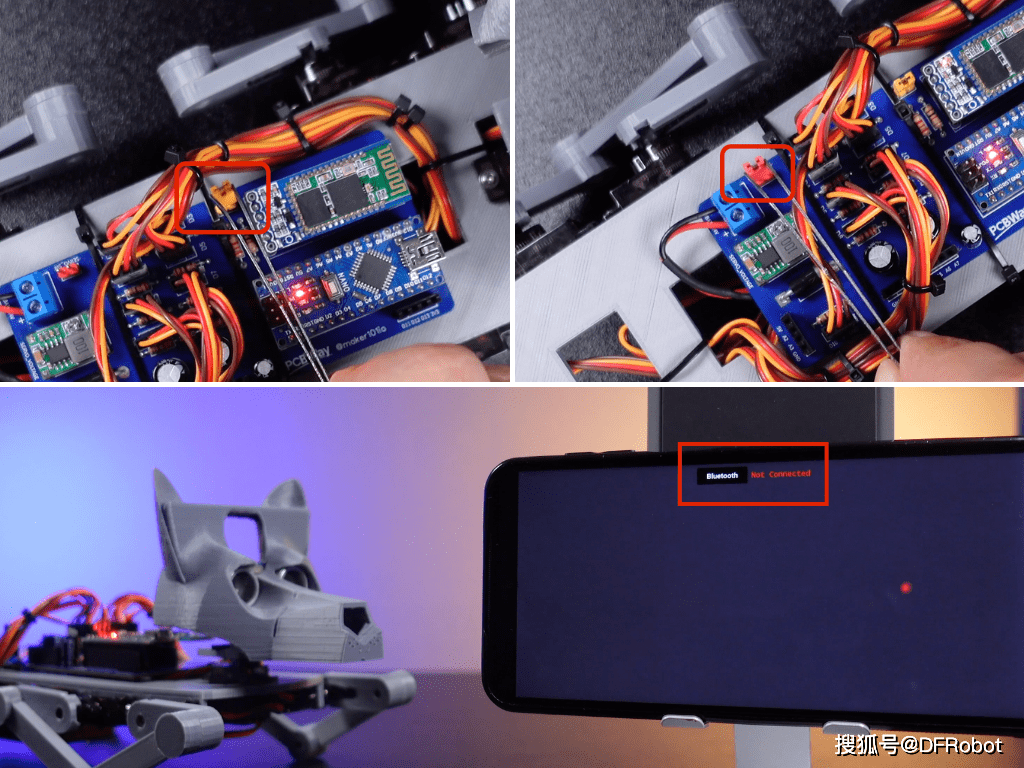
上传代码并安装应用程序后,重新连接板子的电源跳线。打开Android设备的蓝牙连接并在列表中与名为HC-06x的蓝牙模块配对。在配对过程中可能会要求输入密码,通常默认密码是1234(或0000)。然后打开机器狗应用程序,列出蓝牙设备,在列表中找到蓝牙模块并选择它。
-
友情链接 :
- 云开全站(kaiyun)(中国)体育官方网站入口
联系开云
 手机:13382841021
手机:13382841021
 邮箱:admin@yilinc.com
邮箱:admin@yilinc.com
 传真:13382841021
传真:13382841021
 地址:广东省惠州市惠州仲恺高新区潼湖镇三和大道南侧群益智能制造产业园
地址:广东省惠州市惠州仲恺高新区潼湖镇三和大道南侧群益智能制造产业园