


在使用PLC的时候会接触到很多的通讯协议以及通讯接口,最基本的PLC串口通讯和基本的通讯接口你都了解吗?
串口是一种接口标准,是计算机上一种非常通用设备通信的协议。它规定了接口的电气标准,没有规定接口插件电缆以及使用的协议。典型的串口通讯标准常见有如下三种。
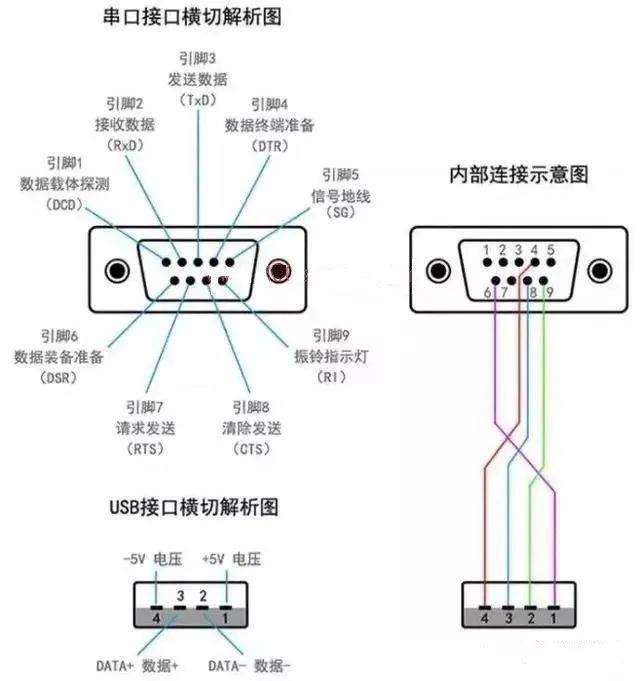
串口通讯使用3根线完成:地线;发送;接收。由于串口通信是异步的,端口能够在一根线上发送数据同时在另一根线上接收数据。其他线用于握手,但是不是必须的。串口通信最重要的参数是波特率、数据位、停止位和奇偶校验。对于两个进行通行的端口,这些参数必须匹配:
波特率反映了串行通信的速率,也反映了对于传输通道的要求。波特率越高,要求传输通道的频率越宽,一般异步通信的波特率在50b/s~19200b/s之间。相互通信的甲乙双方必须具有相同的波特率,否则无法成功地完成串行数据通信。波特率就是每秒钟传输的数据位数。
这是衡量通信中实际数据位的参数。当计算机发送一个信息包,实际的数据不会是8位的,标准的值是5、6、7和8位。如何设置取决于你想传送的信息。
比如,标准的ASCII码是0~127(7位)。扩展的ASCII码是0~255(8位)。如果数据使用简单的文本(标准 ASCII码),那么每个数据包使用7位数据。每个包是指一个字节,包括开始/停止位,数据位和奇偶校验位。由于实际数据位取决于通信协议的选取,Kaiyun官方网术语“包”指任何通信的情况。
停止位是按长度来算的。串行异步通信从计时开始,以单位时间为间隔(一个单位时间就是波特率的倒数),依次接受所规定的数据位和奇偶校验位,并拼装成一个字符的并行字节;此后应接收到规定长度的停止位“1”。所以说,停止位都是“1”,1.5是它的长度,即停止位的高电平保持1.5个单位时间长度。一般来讲,停止位有1,1.5,2个单位时间三种长度。
在串口通信中一种简单的检错方式。有四种检错方式:偶、奇、高和低。当然没有校验位也是可以的。对于偶和奇校验的情况,串口会设置校验位(数据位后面的一位),用一个值确保传输的数据有偶个或者奇个逻辑高位。
例如,如果数据是011,那么对于偶校验,校验位为0,保证逻辑高的位数是偶数个。如果是奇校验,校验位为1,这样就有3个逻辑高位。高位和低位不真正的检查数据,简单置位逻辑高或者逻辑低校验。这样使得接收设备能够知道一个位的状态,有机会判断是否有噪声干扰了通信或传输和接收的数据不同步。
RS-232(ANSI/EIA-232标准)是IBM-PC及其兼容机上的串行连接标准。可用于许多用途,比如连接鼠标、打印机或者Modem,同时也可以接工业仪器仪表。用于驱动和连线的改进,实际应用中RS-232的传输长度或者速度常常超过标准的值。RS-232只限于PC串口和设备间点对点的通信。RS-232串口通信最远距离是50英尺。
RS-422(EIA RS-422-A Standard)是Apple的Macintosh计算机的串口连接标准。RS-422使用差分信号,RS-232使用非平衡参考地的信号。差分传输使用两根线发送和接收信号,对比RS-232,它能更好的抗噪声和有更远的传输距离。在工业环境中更好的抗噪性和更远的传输距离是一个很大的优点。
RS-485(EIA-485标准)是RS-422的改进,因为它增加了设备的个数,从10个增加到32个,同时定义了在最大设备个数情况下的电气特性,以保证足够的信号电压。有了多个设备的能力,你可以使用一个单个RS-422口建立设备网络。出色抗噪和多设备能力,在工业应用中建立连向PC机的分布式设备网络、其他数据收集、HMI或者其他操作时,串行连接会选择RS-485。RS-485是RS-422的超集,因此所有的RS-422设备可以被RS-485控制。RS-485可以用超过4000英尺的线进行串行通行。
1、前言 随着我国电力工业的迅速发展,火电厂的装机容量和单机容量都日益增大,热工保护系统的规模也大幅度上升,对热工保护系统的控制方式、运行水平的要求也越来越高。 热工保护的主要作用是当机组在启停和运行过程中发生危及设备和人身安全的故障时,自动采取保护或联锁措施,防止事故产生和避免事故扩大,从而保证机组的正常启停和安全运行。热工保护是通过对设备工作状态和机组运行参数的严密监视,发生异常情况时,及时发出报警信号,必要时自动启动或切除某些设备或系统,使机组维持原负荷运行或减负荷运行。当发生重大故障而危及机组设备时,停止机组(或某一部分)运行,避免事故进一步扩大。 发电机组的安全可靠性对本机、对电网乃至对国民经济来说都极为重
一般工厂设备考虑的基本上是继电器输出点,继电器使用寿命都是有限的,用了一段时间,是可能会坏掉的,这种情况下,可以换到备用点上,适当调整一下程序就好了。 1、PLC在早期是有点技术含量的小型电脑,因为那个时候都是从日本进口的。现在懂PLC编程的电工很多,找个人改PLC程序并不困难。 但是也要有程序备份,毕竟设备和工艺流程,了解起来要花时间和试错成本的,因此工厂买设备时候,一定要设备厂家提供PLC的源代码做备份云开体育,避免了这些尴尬问题。 2、一般PLC坏的大多数是输出回路的继电器,那种非常小型的,一般是5-24伏线圈电压的继电器,国内也有很多替代品,只要电压和触点一样,封装体积一致,能装上去的,就可以替换了,替换了一般都能解
点坏了怎么办?加个继电器怎么接线? /
摘要: 介绍了利用PLC特殊功能模块实现对电子束流的起/起弧的梯度控制、高压电源的软启动和软关机、工作台的运动速度控制等功能。给出了应用特殊模块设计的控制系统结构及电路、并对用该方法设计的几种控制系统的控制原理进行了重点说明。 关键词: 电子束焊机 高压 电子束流 梯度 工作台 1 概述 电子束焊机是包括真空、高压、电子技术、自动控制和计算机等多种专业学科的高能束焊接设备,它主要由真空系统、高压电源、栅偏电源、阴极加热电源及控制电源、工作台运动机构等部分组成。电子速焊机包括几十个开关量输入、模拟量和较多的开关量输出以及焊接过程控制。由于用一般的模拟控制系统难以实现这些功能的控制。因而
Cypress TrueTouchTM电容触摸屏方案可以在多个领域获得广泛应用:单点触摸,多点触摸手势,和多点触摸识别位置。kaiyun登录入口登录TrueTouchTM芯片与主机通过TX / I2C / SPI /USB接口通讯, PSoC Designer 5.0 提供了相应的各种通讯用户模块,这将大大简化用户的编程和调试工作。本篇文章讨论和比较了各种通讯用户模块的特性,有助于用户为特定应用选择合适的方式。 随着手机、PDA等便携式电子产品的普及,人们需要更小的产品尺寸和更大的LCD显示屏。受到整机重量和机械设计的限制,人机输进接口开始由传统的机械按键向电阻式触摸屏过渡。2007年iPhone面世并取得了巨大成功,它采用的电容式触摸屏提供
作为工业自动化的一种典型应用,PLC最初是做为取代继电器线路、进行顺序控制为主而产生的,后来PLC厂家逐步增加了模拟量运算、PID功能以及更可靠的工业抗干扰技术等功能,并随着网络化的需求增加了各种通信接口,同时伴随着现场总线技术和以太网技术的发展,PLC的应用范围越来越广泛。 什么是PLC 可编程(Programmable Controller)是计算机家族中的一员,是为工业控制应用而设计制造的。早期的可编程称作可编程逻辑(Programmable Logic Controller),简称PLC,它主要用来代替继电器实现逻辑控制。 国际电工委员会(IEC)于1987年颁布了可编程标准草案第三稿。在草
的结构及各部分的作用 /
寻址 寻址可分为直接寻址和间接寻址,以下分别介绍。 (1)直接寻址 直接寻址就是操作输的地址直接给出而不需要经过某种变换,图1所示是直接寻址的。 图1 (2)间接寻址 间接寻址提供寻址在运行之前不计算地址的操作数的选项。使用间接寻址,可以多次执行程序部分,且在每次运行可以使用不同的操作数。SIMATIC S7-1500间接寻址与S7-300/400有较大区别,需要用到PEEK/POKE指令,PEEK指令的参数含义见图2。 图2 掌握PEEK指令有一定难度,以下用几个例子,介绍其应用。 ①位存储区的间接寻址。当参数area为16#83时,代表位存储区的间接寻址,这种情况dbNumber参数为0,而byteOffset代表字的
S7-SCL寻址详解 /
一、小车往返运动 用S7-200实现小车往返的自动控制 ,控制过程为按下启动按钮 ,小车从左边往右边(右边往左边运动) 当运动到右边(左边)碰到右边(左边)的行程开关后 小车自动做返回运动,当碰到另一边的行程开关后又做返回运动 。如此的往返运动,直到当按下停车按钮后小车停止运动。 ▲ 电气 接线图 I/O分配表 梯形图程序 PLC 接线图 程序调试及结果分析 ▲控制平台操作面板 当按下SB2即i0.0(鼠标点击i0.0f)接通后,Q0.0接通,小车右行(即指示 灯 Q0.0 亮)。当小车运行碰到右限位开关SQ2即i0.4(用鼠标点击i0.4f, 模拟 SQ2被压下)接通,此时小车左行(指示灯Q0.
程序调试及结果分析介绍 /
【例4】用复位和置位指令编写。 步进电机是一种将电脉冲信号转换为电动机旋转角度的执行机构。当步进驱动器接收到一个脉冲,就驱动步进电动机按照设定的方向旋转一个固定的角度(称为步距角)。因此步进电机是按照固定的角度一步一步转动的。因此可以通过脉冲数量控制步进电机的运行角度,并通过相应的装置,控制运动的过程。对于四相八拍步进电动机。其控制要求如下。 1、按下启动按钮云开体育,定子磁极A通电,ls后A、B同时通电;再过1s,B通电,同时A失电;再过1s,B、C同时通电.....以此类推,其通电过程如图1所示。 2、有2种工作模式。工作模式1时,按下“停止”按钮,完成一个工作循环后,停止工作;工作模式2时,具有锁相功能,当压下“停止”按钮后
梯形图编程(4) /
控制及应用实例 target=_blank
编程实例精选 target=_blank
与触摸屏、变频器、组态软件应用一本通 target=_blank
看好RISC-V于AI、车用电子、应用处理器及安全技术的市场动向2024年4月8日 — 近年来,RISC-V 在车用电子、资安技术和人工智能等先进领域 ...
编译自意法半导体博客继2023年宣布推出STM32MP2系列后,ST目前推出了包括STM32MP25,STM32MP23和STM32MP21三款产品。 STM32MP25将于今年上 ...
芯原携最新的高效能IP应用亮相2024年国际嵌入式展面向广泛应用场景,赋能下一代创新2024年4月9日至11日,芯原展位号:德国纽伦堡会展中心, ...
面向消费电子、小家电、工业系统控制和楼宇自动化的低成本产品2024 年 4 月 9 日,中国北京讯 - 全球半导体解决方案供应商瑞萨电子 ...
超级高铁技术是一种十分新潮的交通概念,它有望以其高速、低压系统重新定义移动出行的未来。超级高铁的核心是在密封管网络中,乘客舱在磁悬 ...

站点相关:嵌入式处理器嵌入式操作系统开发相关FPGA/DSP总线与接口数据处理消费电子工业电子汽车电子其他技术存储技术综合资讯论坛电子百科Kaiyun官方网
-
友情链接 :
- 云开全站(kaiyun)(中国)体育官方网站入口
联系开云
 手机:13382841021
手机:13382841021
 邮箱:admin@yilinc.com
邮箱:admin@yilinc.com
 传真:13382841021
传真:13382841021
 地址:广东省惠州市惠州仲恺高新区潼湖镇三和大道南侧群益智能制造产业园
地址:广东省惠州市惠州仲恺高新区潼湖镇三和大道南侧群益智能制造产业园